It's been a while since we had a good old fashioned post and I feel that it is unfair to all of you to keep you in the dark. In this post I hope to cover a few points that concern our future as well as the robot activities that have been going on.
1. Brandon is going to College
Yay Brandon (that's me)! Moving up in the world and becoming my own man! Unfortunately, that means boo for the robots. Because I will be spending all my time at the University of Maryland, College Park, I will have next to no time to come home and do the robot building. Add in the factor of also trying to hold down a job/submit scholarships to pay for said college and that equals little to no resources being poured into the robots for long periods of time. As a result of this, the hallowed Columbia Mall where Bot Blast is being held this year will not include us ;_; Additionally, even the Franklin Institute event annually hosted by NERC is in possible jeopardy depending on the school schedule. However, there is a trade-off to this potential hiatus: knowledge and greater resources. not only will I be learning about all the technical stuff that Charles and Jamison and Pete and a whole bunch of more senior builders know. Additionally, I will gain access to cool machines such as a lathe or mill which allows the creation of uber-devious machines in the future.
2. Robots are still going to be a thing
Despite the above messages of gloom and doom, building combat robots is a passion of mine and will continue to be a thing. Even now, there are a few designs that I am working on that I haven't even explicitly expressed ;) While there may be periods of time where myself (or the team) may be busy and unable to attend events there will always be a commitment to continue the sport. In a more practical way, I already decided that the best way to deal with this is to build up the robot fleet while I have freetime, i.e. the summer! So now almost everyday I journey out to the machines and work on them. And now onto the fun 3rd point!
3. Robot Stuffs!
Alright so now with all the more serious matter covered, onto the more fun stuff!
El Destructo

This is the beginning stages of the current rebuild of El Destructo. As seen, the baseplate is polycarbonate/lexan which can be purchased from any Lowes in the area (reminder that we work on a budget) and attached it to the same old pieces of El Destructo that were with it back in 2010. In many ways, there isn't much changed beyond merely re-assembling it.

In this picture you can see the basic points of the design i.e. the motors in place. From this point on assembly went by breezingly. So breezingly that I actually forgot to picture so soorryy. But essentially, this goes along as most robot builds go with the electronic wiring, cutting of material etc.

This is about where it ended up at. The electronics are all wired up and its working fine. Only trouble here is that the frame rails were a little uneven meaning that the traction is a little difficult. After trimming the bottom of it for awhile I got it to a good balance. Before it competes again I hope to get a thin layer of rubber of it on to get muuuuxxiimmummmm trraaccttiioonn. But for now it is just sitting because of the focus on the main competitor....

Yes! I mean wait not this but also this exactly! You see Russ Barrow, long-time veteran/ contributor on the Combat Robotics Facebook page (place where all the cool kids chill at)/ Admiral of the Dark Forces, created a handy dandy solution where the 1000RPM gearboxes sold through Kitbots and on eBay is paired with a brushless motor creating a amaaaazzingly powerful drive system at only a fraction of the weight of having to use 4 drive motors for comparable output. According to the specs, each of these motors can produce up to 89W of power

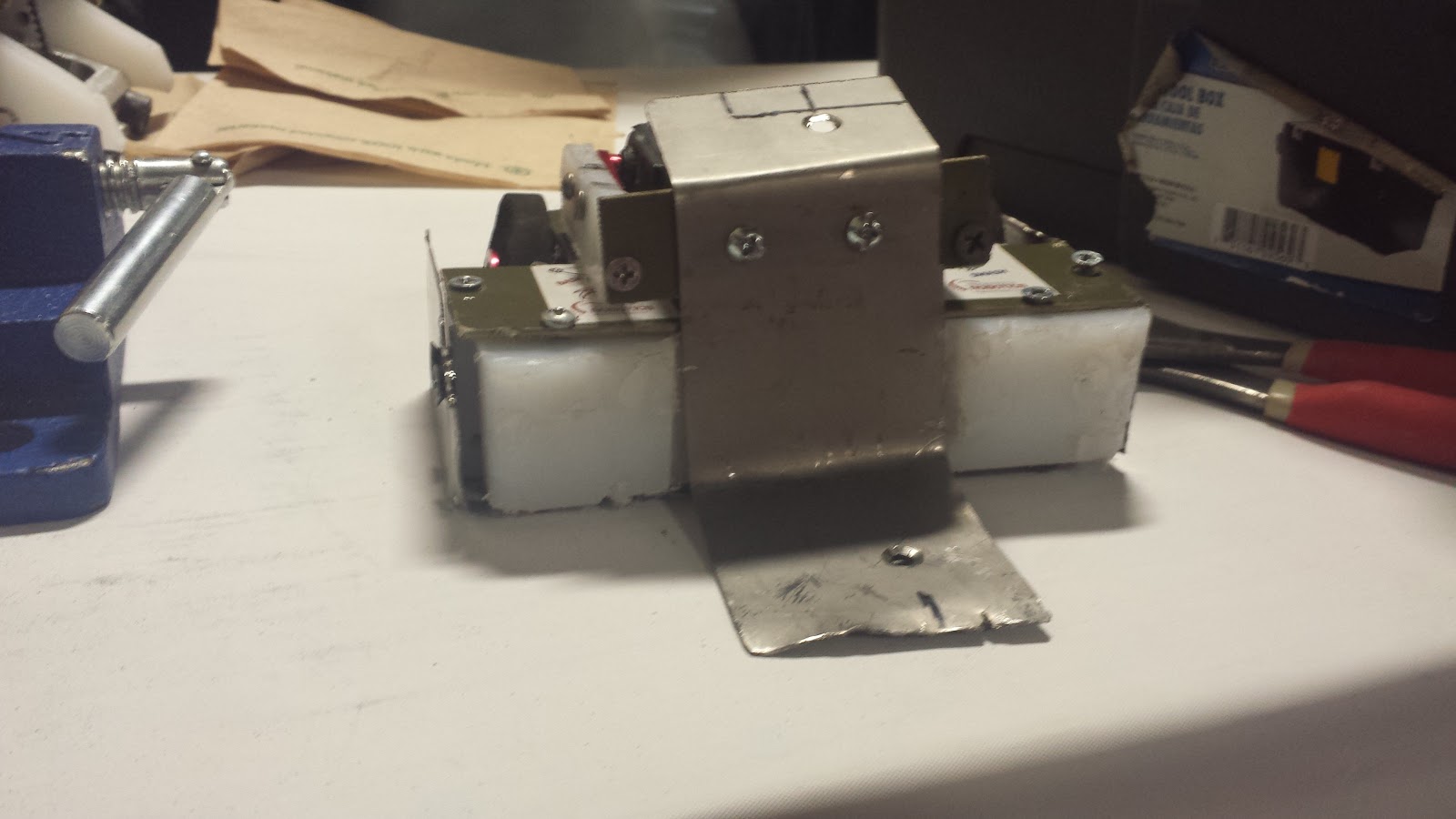
Here are the beauties installed into the chassis of WoD v3. One of the troubles that plagued WoD v3 at Motorama was that the drive train wasn't nearly strong enough to push both itself and another robot (at least not quickly) which resulted in rather lack luster performance. Comparatively, that creates the equivalent of jet engines on a Fiat 500.

WoD v3 as it sat before testing. At this point, the idea of having hard-mounted front wedges was abandoned and instead another cross member was added. This essentially turned WoD into a brick with only hinge wedges on the front. That piece of aluminum on the top is connected to the lifting servo which got re-oriented to flip better. In the first setup of WoD v3 the servo was connected by linkages to a floating lifting arm much like the original WoD: Wedge of Doom (not Destruction). Instead, the servo is directly mounted to a right angle bit of aluminum similar to that of Revenge of Dr. Super Brain

So here's the video of it testing

And my reaction about it immediately after finishing it

After confirming that the drivetrain works well, I proceeded to work more on that lifter I mentioned before. That piece above is Grade 5 .063" Titanium. I used a propane torch from Lowes to slow heat it.
The recipe to bend titanium is pretty simple: just heat up the Titanium until it is about cherry red and then bend to appropriate position then quench in water.

And voila you bent the lifting face to shape. After I punched a few holes in the top of it I connected to that aluminum plate. Those little bits of Ti are designed to hold the robot down and not allow it to faceplant that hard. If these weren't there, the robot would roll onto its face and invert itself because the lifter acts as a fulcrum. Those prongs serve as a way to shift the fulcrum more onto WoD v3 which allows it to flip the other robot up.

And I added preettyyy liighhtsss. Besides looking hecka dope in a dark room, they are also a very clear indicators to tell if the robot is on or not. To connect this to the power, I wired it directly into a plug into the receiver. As a result, if WoD is damaged in battle or at least knocked the hipple out I can see the state of the receiver. If the receiver/ lights are not reacting at all then I can clearly see it and then mourn appropriately.

Dope pic with the UHMW glowing and the emperor's hat. Originally, that piece was designed to be on the original WoD v3 iteration then was put away once I realized it needed to stick out waaaay more to be useful. Now its on WoD's head to be a crown technical reasons like self-righting. This extension allows the lifting arm to extend far enough to allow the wheels to touch the ground and pull it back right-side-up. Unfortunately, it also allows it to faceplant but that will never happen in combat happen anyway and will be filmed most likely by Other Brandon. But enough of that! On to the reaaaalllyyy interesting stuff.
Flywheel Flipper Thingy
Man has been vexed by a struggle for many a time of one question.....how to flip a robot using circular motion? This question has been one of immense interest in the robot combat community. People such as Team Whyachi, The Didactic Dale Heatherington, and Charles-Senpai have created solutions, but I thought to myself why not and threw my hat into the ring.

This is a really simple sketch I made for my submission into the flywheel flipper frenzy. This design is remarkably (perhaps way too) simple. Basically, think of it as one of those old carnival games that tests your strength. The whole mechanism is essentially a lever that utilizes the kinetic energy of a hammer in motion to move a piece of metal on the end and launch it upwards. A lever is a simple machine so there is very little loss in that transfer (assuming the parts don't just shatter from the energy in the impact). The springs in the front are holding the lever away from the beater drum allowing it to achieve high rpms. The only way this engages is by the robot driving head-first into the opponent at high speed. At ramming speed, the resistance of the springs will be overcome by the inertia of opposing robot pushing against the flat face of the lever. This speedy entry (heh) will force the lever (hopefully) into the beater bar quick enough to allow the beater to "bite" the same way it would against an opponent robot and therefore transfer the energy into the lever. After the object (i.e. other robot) is removed from the lever by forced flight the springs will naturally pull the lever from the beater and reset. Sounds good in theory right?
Well, Charles-Senpai and the greater community had points about this design as seen in this quick blurb:

Very important points put up here that I will have to address for this to work. A some of them tried to be covered here:
- The "bite" will be attained by the speed of the robot. I intend to use the aforementioned brushless drive motors that will give the robot a insane top speed. While I do not have the exact speed to tell you the force, I can guess that with 2" wheels on 3s 11.1V Lipo it will be very fast.
- The design of the lever is with the use of socket head screws. These screws are specially treated to be able to handle harsh impacts and are made of much tougher stuff than say the Aluminum or UHMW around it. Hopefully this will result in some better stuff....

A little more flushing out of the design. In this the drum is only 2in in diameter.

In this design the lever shape has already changed and the inclusion of a Weta beater bar is used. Since it is not only a quality but is also readily available (i.e. gifted from PK) it was simple just to drop it in.

Little more experimenting with lever solutions

It was at this point that I then said screw it and just threw something together from scrap parts using approximations from the CAD-ing

After a little more buildup and detail it got to here. During testing,

The final activity
undertaken before I left for college was to harden CATAPULT's shell. It was a
very simple setup: Just focus propane torch on to spot (in this case teeth)
until it turned a certain color/temperature (in this case cherry red), quench
in water (don't remove until all hissing sounds have stopped), then heat up a
little more then let air cool.

In the sunlight it
doesn't look very red but with the garage closed....

It’s QUITE bright. This
whole process went down on all the teeth. At least now the next time CATAPULT
would have to fight a robot like Chibi Blackout at least the teeth won't be
destroyed :/
That's about everything
for now! College should be starting in about two days after this post is
published and as a freshman living in a dorm I won't be able to do robot stuff
since classes are here and the tools are somewhere else. Ciao!